




News
Undersea Exploration Pioneered by Unmanned Robots
Team KUROSHIO: The story of the challenge to the last frontier on earth─the deep sea
Updated in January 2021
First published on June 25, 2020 on JST’s Science Portal website

The sea occupies about 70% of the earth’s surface. Most are deep seas with a depth of 200 meters or more, further down than light can reach. Detailed seafloor topography is not available for most areas. In December 2015, the Shell Ocean Discovery XPRIZE was announced. It is an international competition to explore the unmapped seabed. Departing from previous competition rules, participating teams would only be allowed to use unmanned robots to explore the deep sea. This ignited the passion of our young researchers, who later received the honor of the runner-up prize in the finals. We followed the numerous challenges faced by Japan’s seafloor exploration team—"Team KUROSHIO."
Wanting to Know More about the Planet We Live On
"It's kind of frustrating that we don't know the actual shape of the planet we live on. Now that anybody with a smartphone can easily look up a detailed map of land surfaces, people think that it’s just as easy to understand the topography of the ocean. But in reality, few areas of the sea floor have detailed maps like land," explains Ohki Takeshi, one of the co-representatives of Team KUROSHIO (hereafter, KUROSHIO).
Alongside outer space, the deep sea is often referred to as the last frontier of humankind, but little is known about the deep sea even compared to the moon. Topographic maps of terrain on the moon, 380,000 kilometers away from Earth, can be observed in as fine as 10 meters’ range even in very rough areas. In contrast, most seafloors have topographic maps only at a resolution of 450 meters.
Topographic maps of the seafloor provide important information that forms the basis of all kinds of marine activities, like fisheries and resource exploration, in addition to geological, biological and earthquake-related surveys. Above all, pure curiosity to better understand seabed topography is a great motivation to explore the deep sea. Seafloor exploration, however, involves great difficulty.
There is no light in the deep sea, and radio waves cannot pass through it. And so sound waves are emitted from a ship towards the seabed, and the terrain is examined by the echoes that bounce back. However, surveys conducted in the ocean have found that the deeper the water, the harder it is to detect the echoes. That's where the autonomous underwater exploration robot AUV comes into play. Since the AUV can emit sound waves close to the seabed, it’s easier to catch the echoes, improving the accuracy of exploration data. On the other hand, this device’s range is smaller than a ship’s, so it is more difficult to survey a wide topographic area.
The biggest problem is cost. A ship of substantial size is required to carry the AUV to the survey area. Operating it requires enormous fuel and labor costs.
Nevertheless, there is a strong need for detailed seafloor maps, and industry is focused on speeding up seafloor exploration and reducing exploration costs. Under such circumstances, the international race "Shell Ocean Discovery XPRIZE" (hereafter, "the race") was held to explore the unknown seabed. 32 teams from all over the world participated in the race, and the All-Japan team KUROSHIO made a name for itself. Contributing were eight industry-academia-government organizations equipped with the technology and know-how necessary for developing marine robots.
*Shell Ocean Discovery XPRIZE is an international race for unmanned undersea robots to explore the uncharted seabed. It was hosted by the US XPRIZE Foundation and was mainly sponsored by Royal Dutch Shell, a major oil industry company.
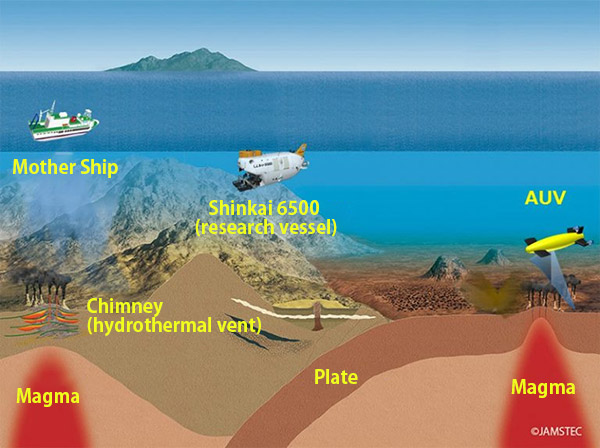
* What is an AUV (Autonomous Underwater Vehicle)?
It is an autonomous underwater robot that can approach the seafloor to investigate. AUVs can help obtain more accurate topographic maps. It communicates through sound waves.
Team Faces Unexpected Trouble in the Finals
On December 13, 2018, a member of KUROSHIO was at the port of Kalamata in Greece, where the final race was to take place. Amid high waves from bad weather, he waited for reports from two unmanned robots heading to the competition site. Exploring the bottom of the deep sea were the autonomous underwater exploration robot "AUV-NEXT" (hereafter, the probe) and the unmanned robot ship "ORCA" (hereinafter, ASV), which towed the probe to the mid-sea competition area.

At any time, the robot’s exact location can be sent to the land control station by satellite. The two robots fought through the high waves, taking several hours to reach a detachment point about 30 kilometers offshore. Next came the separation of the probe. Members watching over the screen at the control station carefully sent a command to disconnect. Immediately afterwards, members froze.
"The probe’s depth gauge isn’t moving!?"
The probe was meant to separate from the ASV and dive deep towards the seabed. However, the probe did not respond to the disconnect signal. Even if they tried to check the state of the probe with the camera attached to the ASV, it was nighttime. It was pitch black and nothing was visible. They sent the disconnection signal many times along with a prayer, but the display of the depth gauge did not budge.
* What is an ASV (Autonomous Surface Vehicle)?
It is an unmanned robot boat that relays AUVs on both the sea and land. It autonomously follows the underwater AUV, receives the information transmitted by sound waves from the AUV in the sea, and transmits that data back to land by satellite.
Back to the Ocean Adorned with Christmas Decor
“The probe is not detached from the ASV!”
The team was in a panic. Three years after the announcement of the international race, the team had prepared and survived until the finals, but now they could not even start! Luckily, the area where the ASV failed to detach the probe was just outside the competition area. Ohki immediately negotiated a re-challenge with the referees. Due to the discretion of the organizer, they were permitted a retry. When the team saw the two ships returning to port, they figured out the cause of the accident. Due to the roaring waves, the electric wire for sending the separation signal from the ASV was itself severed.
The team fixed the wires and reinforced them, and also decided to illuminate the towing frame* connecting the probe and the ASV, so that the camera behind the ASV could check the status of the probe even at night. However, they did not bring any lighting devices to attach to the towing frame. Members of KUROSHIO rushed to a nearby DIY store in Greece. It was right in the middle of the holiday season, so they were able to get a set of Christmas LED lights. On December 16th, the probe paddled into the sea again, this time wearing a festive string of lights.
* Towing frame: Equipment for connecting the ASV and the probe. When the disconnection device is activated from land via satellite, the probe is detached from the towing frame and starts to dive.

"No matter how much you prepare, accidents can always happen. The important thing is whether you can deal with them appropriately. KUROSHIO was blessed with wonderful members who can think and act independently." Nakatani Takeshi, one of the team's co-representatives, looked back fondly on those exciting days.
Mission: Explore 500 Square Kilometers in 24 hours
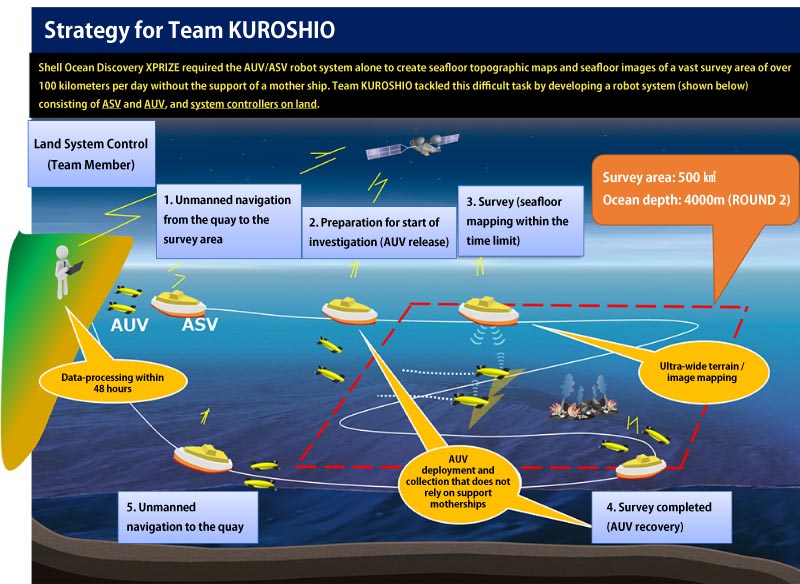
In the XPRIZE race, the main rule was not to use manned motherships, which are essential for normal seafloor exploration. The rule aimed to accelerate completely unmanned navigation by robots, and to speed up technological development for exploring wide-area seafloor topography. The initial goal was to "explore 500 square kilometers of seafloor topography within 24 hours." The task was a hard one indeed considering the technical standards at the time.
However, that vision is not only what industry should aim for in the future, but also scientific ocean exploration.
"We want to have a crack at that race."
Four young researchers with the same aspirations came forth. They later became co-leaders of Team KUROSHIO. A few months after the exploration criteria was announced, the range to be explored was reduced to 250 square kilometers. The challenge was not just based on hope, but was now a tangible and realistic goal. Girding themselves for the challenge ahead, the initial KUROSHIO members started face-to-face discussions.

*Image courtesy of Team KUROSHIO

The KUROSHIO logo. The team is named after the warm Kuroshio Current, known throughout the world. It symbolizes the aspiration to create a hot and powerful trend from Japan.
*Image courtesy of Team KUROSHIO

*Image Courtesy of Team KUROSHIO
"In the race, we discussed what is necessary to solve current ocean exploration challenges, and we came up with a plan named One-Click Ocean. If a user clicks once, the unmanned robot leaves the quay. It is a system that can depart autonomously and collect data automatically. If this works well, it will greatly impact academic research as well as industry. “(Ohki)
The concept was eyeing a future beyond the race itself, towards one of technological development in ocean exploration. What was needed to make One-Click Ocean a reality?
"AUVs are powered by lithium-ion batteries, which are also used in smartphones. So their operating time is limited. In order to keep the batteries working as long as possible, we thought of using a robotic ship called ASV which would sail up to the competition area in the middle of the sea. I thought of a strategy to pull the AUV with the ASV robot and then to detach the AUV precisely at the competition site. “(Nakatani)
*Image courtesy of Team KUROSHIO (partially modified)
Many Empathized with KUROSHIO’s Vision
The overall strategic concept had been set up, but there was still a year and a half left before the start of the preliminary match. A team of young members do not have the funds necessary to create a new robot just for a competition. They also lacked manpower. The four co-leaders decided to seek cooperation and called on domestic organizations that already own underwater probes.
The team was able to secure a total of three probes with cooperation from the Institute of Industrial Science at the University of Tokyo, where Dr. Blair Thornton (one of the team leaders) was an Associate Professor. The National Maritime Research Institute also came to the rescue and the team was able to secure three probes. But probes are not enough to win the race. Modifying and operating the robots, securing work space, acquiring communication technology to be used both on and in the sea, not to mention technology for transporting equipment and compiling an unbelievable amount of reference materials—all this was necessary for participation. It would have been impossible for just four people.
So, the four tried to recruit supporters. They mainly called upon young researchers and engineers in their late 20s and early 30s. However, the people the team wanted to recruit were exceptionally talented workers. Getting formal approval from each institute or university was a punishing task. Nevertheless, the four co-leaders spoke with passion about KUROSHIO’s vision, and persistently persuaded these organizations of the benefits of participation, such as the knowledge and technology supporters stood to gain from joining the race.
Because of that ardor and passion, many people empathized with the team’s objective, and eventually eight organizations agreed to cooperate. The number of team members increased to about thirty, and KUROSHIO was ready to set sail.

*Image courtesy of Team KUROSHIO
Connecting ASVs and AUVs from Different Institutions
In order for humans to conduct exploration with unmanned robots without themselves going out to sea, satellite communication and acoustic communication systems that connect land control, offshore ASVs, and underwater AUVs are essential. This equipment was collected from different research institutions, but their communication systems differed. Furthermore, in the actual test in the sea, the noise of the ASV outboard motor and the AUV thruster was excessive, and the actual position of the AUV could not be relayed well. By building a new system, the team was able to integrate the different communication systems. The team also attached underwater microphones to the probe’s body and analyzed frequencies so that the underwater vehicles could explore with a stable sound system. Now underway were very detailed tasks like finding out which frequency band cam was hindering positioning information—and all the while, additional team members were being gathered.
Improved Accuracy of Topographic Maps Made KUROSHIO the Runner-Up in the Finals
Initially, Round 1 was scheduled to be held in Puerto Rico. Due to a super-large hurricane, it became difficult to hold it there. So, the criteria changed to a technical evaluation test* of each country’s participants. KUROSHIO passed this test and advanced to Round 2, the finals.
*Technical evaluation test: A test in which a race judge visits each team's base and evaluates whether they have the equipment and technology necessary to pass Round 1.

*Image courtesy of Team KUROSHIO

*Image courtesy of Team KUROSHIO

*Image courtesy of Institute of Industrial Science, the University of Tokyo
The duration for the Round 2 competition period was eleven days. KUROSHIO’s slot was scheduled for mid-December 2018. Their attempt was set to take place at the port of Kalamata, Greece. Unfortunately, Kalamata was hit by bad weather. The rough seas got the best of the team, leading to the wire disconnection misfortune described above. For KUROSHIO, which had had only one chance for testing the actual robot in the sea up to that point, this was an unforgettable first experience. The team was directly faced with the raging sea.
After making repairs the team went on with their permitted retry, but the weather continued to be atrocious. In order to prevent the electric wire from being severed again, they decided to disconnect the probe earlier than planned. This turned out to be successful, and the probe maneuvered itself smoothly. After a dive of about 27 hours, it resurfaced safely. Near dawn, the ASV came back safely to the port. It was an unmanned exploration that lasted about a day and a half.
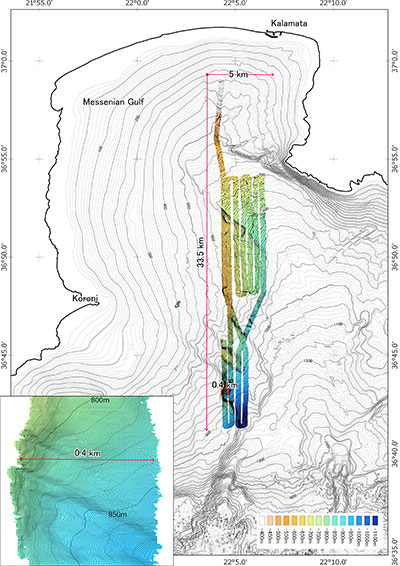
After returning to the port, the team confirmed the measurement data brought back by the probe. The result did indeed achieve its big catch. Members cheered. After receiving the data analysts worked all night to improve the accuracy of the topographic map. After the allotted 48 hours of analysis, images showing characteristic terrain and objects that looked like sunken ships were found. After submitting the brushed-up seafloor topographic map and photographs to the XPRIZE secretariat, KUROSHIO reached the ultimate goal of their three-year battle.

Tasks for the data analysis team begin after the ship comes back
*Image courtesy of Team KUROSHIO

KUROSHIO members breathe sighs of relief after successfully submitting their data
* Image courtesy of Team KUROSHIO
Six months after the fierce battle, KUROSHIO members were at the Musée océanographique de Monaco (Oceanographic Museum of Monaco) to attend the XPRIZE award ceremony. Members, dressed unfamiliarly in formal attire, quietly waited for the announcement.
The result was second place─runner-up to the finalist. When the name KUROSHIO was read aloud, young researchers raised their fists up in the air. Although the victory was handed over to the international GEBCO-NF Alumni Team, it was a satisfying fight. Attempting this international race seemed reckless at first. Members were almost at a loss over the countless challenges that stood before them, but that moment vindicated everything they went through together.

*Image courtesy of Team KUROSHIO
The Dream Has Just Begun: KUROSHIO Will Change the Future of Seafloor Exploration
Mr. Nakatani looks back on the three years he fought as a member of KUROSHIO.
"I was almost in a deadlock many times, but I am proud to have overcome the challenges with my team members, and to have achieved second place in the world. Each member had their own strength to offer, and successful engagement led to our result. The warm support from our sponsors and supporters was a strong driving force for the race. I want to thank everyone."
The fierce battle of KUROSHIO has come to an end. However, the dream of changing the future of seafloor exploration based on the technology cultivated through this race has just begun.
Japan's exclusive economic zone* boasts the 6th largest sea area in the world, and many mineral resources—like rare earths necessary for making electronic devices as smartphones—are sleeping in the surrounding seabed. However, it is not yet clear where and how much of these resources are available. At present, probes are beginning to be used for investigating such distribution of resources, and cost reduction is an urgent issue. In addition, if a wide range of seafloor photographs can be obtained using a probe, it will be useful for estimating resource quantities and investigating seafloor organisms.
The battle, which began with the passion of four young researchers, was accomplished on the rough seas with cooperation from eight organizations that empathized with their vision. Their efforts will not end until the day when KUROSHIO's One-Click Ocean becomes a reality.
*Exclusive economic zone: Bodies of water where coastal nations can exercise their rights to explore and develop resources like seafloor organisms and minerals.
Column
――Please give some message to students who want to learn about the deep sea and seafloor exploration.
Mr. Ohki: I've loved making robots since I was a child. When I was in junior high school, I even participated in a Mars exploration robot contest for children. That is why I am now engaged in R&D related to underwater robots, but what I am today is based on my curiosity about familiar things. People might laugh at you, but sometimes it's important to have confidence, believe in your curiosity, and rush towards your goal.
Mr. Nakatani: In contrast to Mr. Ohki, I became interested in marine robots only after I entered university. Knowing that far fewer humans have ever reached the deepest point on earth, the Mariana Trench, than have reached the moon or the peak of Mt. Everest, I was strongly attracted to the world of deep-sea exploration, I transferred to the faculty of engineering at my university in my third-year. Of course, there were some difficulties, but I think that if you believe in what you want to do and work persistently, you can get there. By the way, when I was a high school student, I was enthusiastic about shogi, but the high school I attended didn’t have a shogi club. So, I gathered friends and created a shogi club from scratch. Such an experience may have been useful for gathering members in the early days of KUROSHIO. At first glance, underwater robots and shogi do not seem to be related, but in each case, it is important to flexibly respond to changes in the situation while valuing elaborate strategies. I feel that such aspects are also being utilized in my current research.
Mr. Sugiyama: I participated in KUROSHIO as administrative staff, not as an R&D member. It is also an important task to support research by creating a framework for smooth project implementation and for the allocation of human resources. Researchers are not the only ones involved in R&D. I hope you will also get to know the fulfillment that comes with supporting researchers behind the scenes.
Profile

■ Interest in Marine Life
I don't see many creatures at the bottom of the deep sea, but when I suddenly encounter small shrimp or sea cucumbers, I get a warm relaxing feeling. Recently, I am interested in the ecosystem of Osedax japonicus, which lives off of dead whale bones.
■ Current Research and Future Vision after KUROSHIO
Whether in space or on earth, on land or in the sea, there are various unknown worlds that change from moment to moment. I would like to develop a technology that allows robots to investigate the vast worlds that cannot be investigated by humans alone.

■ Interest in Marine Life
A sperm whale that can reach down to 1,000 meters in the deep sea despite being a mammal just like us humans.
■ Current Research and Future Vision after KUROSHIO
We would like to promote the automation of all surveys from the surface to the bottom of the sea. In addition, I want to make a system which will allow the public to feel more familiar with the deep sea. Through this system you could, for instance, experience the deep sea through your five senses while on land, or you could remotely control a robot that is actually diving in the deep sea.

■ Interest in Marine Life
My hobby is diving. My best memory is seeing a basket fish in the sea at night in Okinawa.
■ Current Research and Future Vision after KUROSHIO
I would like to boost the Japanese marine industry. This project is not the end, and I would like to develop more industry-government-academia networks, and to create new networks as well.
Original article from JST’s Science Portal website
Translated by SSC Secretariat