News
NEDO and Tokyo Tech Team Confirmed Capability of Longest Multi-Joint-Robot-Arm: To be Used for Nuclear Decommissioning and Infrastructure Inspections Updated in May 2019
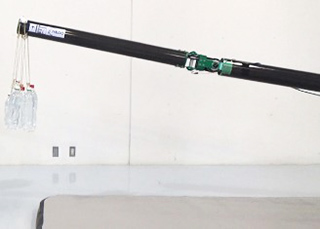
Research team consisting of New Energy and Industrial Technology Development Organization (NEDO) and Tokyo Institute of Technology announced that their newly developed 10-meter robot-arm can firmly hold a 10-kilogram object horizontally. As an articulated robot-arm with many joints, it is the longest in the world so far. This robot-arm may be used to inspect age-deteriorated bridges and tunnels or to work on the decommissioning of nuclear reactors.
Many large infrastructures in Japan have been built during the rapid economic growth during 1950-1970s, and inspection work to ensure safety has become a pressing issue. Some of such sites are dangerous and difficult for humans to work on, and thus, utilization of robots and robot-arms will help greatly.
According to the research team, it was difficult to develop the long robot-arm to hold heavy objects due to the leverage (lever principle) placed on the arm. To counter this, the team devised a system to disperse the load: a rope made of a many high-strength chemical fibers was wound around the pulley located at the joint of the robot-arm. Moreover, the arm itself was made lighter and by passing a thick rope inside the arm, the weight carried at the tip of robot-arm was able to maintain the horizontal position. In the demo experiment, the arm was able to hold a 10-kilogram object horizontally. In the future, the arm will be improved so that it will be able to vertically lift and carry heavy objects.
The robot-arm has a diameter of 20 centimeters, so it can be inserted into a narrow space by bending. Also, a camera could be attached at the tip of the arm. Therefore, this robot-arm may be used at nuclear plants to decommission spent reactors, namely Fukushima No. 1 Nuclear Power Plant of Tokyo Electric Power Company (TEPCO) which was destroyed by a tsunami that occurred during the Great East Japan Earthquake on March 11, 2011. Whether it can really be used at the decommissioning site will be verified at the Japan Atomic Energy Agency ‘s (JAEA) Naraha Center for Remote Control Technology Development located at Naraha-cho, Futaba-gun, Fukushima Prefecture.