News
Tohoku University to Develop New “Robot Hand” - A Device Which Can Grip on Sharp Objects Amongst Flames Updated in January 2019
A team of researchers from Tohoku University developed a robotic hand that can hold a sharp object in the midst of a burning flame. Firefighters will be able to use this device during fire breakouts and disaster rescue missions where flames could rise to an ultra-high temperature.
The new disaster robot-hand was developed by Kenjiro Tadakuma, Associate Professor for the Graduate School of Science at Tohoku University, and his team of doctoral students. Up to now, the robot-hand for disaster sites was shaped like a bag to wrap around the target object. It was made of rubber that could burn easily.
Whenever the device tried to grip a sharp object found among flames. The bag-shaped section or the actual hand of the robot would tear or catch fire after a while. Even at rescue sites without fire, broken glass or debris of reinforced concrete with pointed steel frames were difficult to pick up and had damaged the bag-shaped section of the hand.
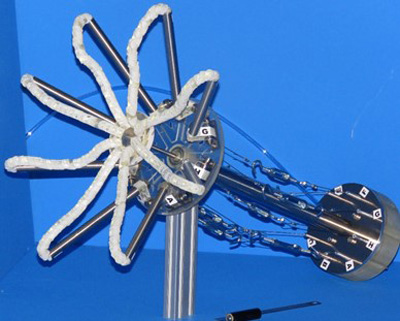
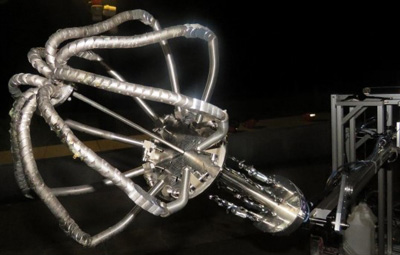
In order to solve this problem, the research group used a flexibly beaded structure on the robot-hand’s “fingers” and placed these beaded fingers in a radial shape by adopting the so-called one dimensional jamming mechanism. A highly durable heat resistant metal was used for the beads. Because it is light-weight, it can be mounted additionally onto a disaster rescue serpentine (snake-shaped) robot or onto a legged robot that has already been designed. The team explained that the new robot-hand can pick up things that have been difficult to grip under extreme high temperature: hot objects, broken valves, broken glass, fly-out nails, steel wire fences and so on. This device can also be utilized at a manufacturer’s production site where goods or materials of various shapes are handled.
The demonstration of this new robot-hand was held on November 2 at the new R&D hub Fukushima Robot Test Field (Minami-Soma city in Fukushima Prefecture). This research was carried out as part of the ImPACT (Impulsing Paradigm Change through Disruptive Technologies) program supported by the Prime Minister’s Cabinet Office.
Fukushima Robot Test Field
https://www.pref.fukushima.lg.jp/uploaded/attachment/295347.pdf
ImPACT
https://www.jst.go.jp/impact/en/intro.html
Tohoku University Human-Robot Informatics Laboratory
https://www.rm.is.tohoku.ac.jp/englishtop/